
高精度位置測位 RTK
🔳 ドローンの位置制御
簡単なおもちゃのドローンを除くと、一般的にドローンは一切操作をしなくても弱風や無風下では同じ位置に留まり続け(ホバリング)、また上昇下降や前後左右の移動、水平回転などの動作も極めて安定しています。
手動でドローンを操作して散布を行う場合でもかなり正確な制御ができますが、自動航行を用いると非常に精密な制御が可能になります。自動航行の場合、ドローンが自分自身の位置を高精度で知っている必要があります。
位置測定をなるべく正確に行うための技術はいくつかありますが、産業用ドローンやスマート農業機器ではGNSS(Global Navigation Satellite System:全地球航法衛星システム)と呼ばれる方法、その中でもRTKという技術が主に用いられます。
スマホやカーナビで用いられているGNSS(一般的にGPSと呼ばれる)による測位は、気象状況などさまざまな誤差要因で実際の正確な位置から数十センチから数メートルほどずれていることがあります。カーナビなどでは地図情報から道路上の位置に補正するなど、実用に影響のないよう作られていますが、産業用ドローンやスマート農業機器では大きな問題になります。
🔳 高精度な位置測定
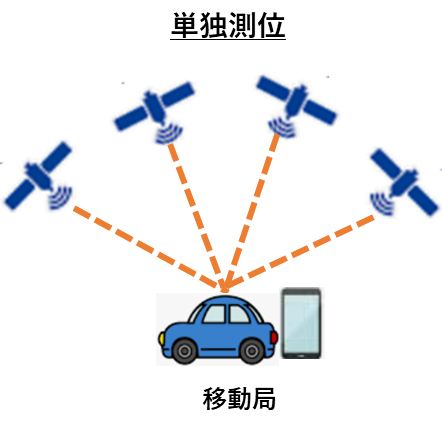
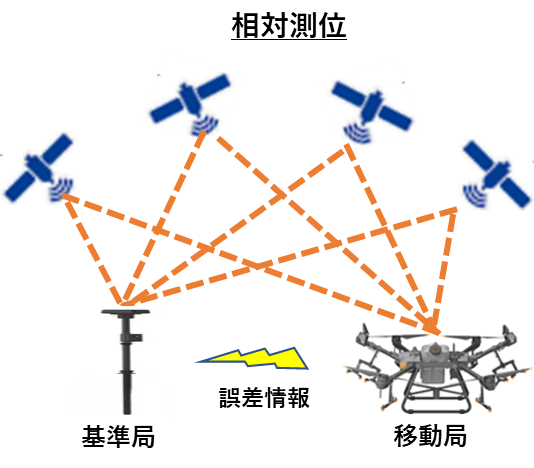
GNSSによる測位には、移動しているアンテナ・受信機が自分自身で測位を行う単独測位と、あらかじめ位置が分かっている基準局から誤差情報をもらいながら測位する相対測位があります。ドローンの自動航行などで用いる高精度測位は相対測位を使用します。
相対測位では、衛星電波から測位する方法の違いや、誤差情報の通信方法などの違いで、いくつかの方式が開発・使用されています。
GNSS単独測位
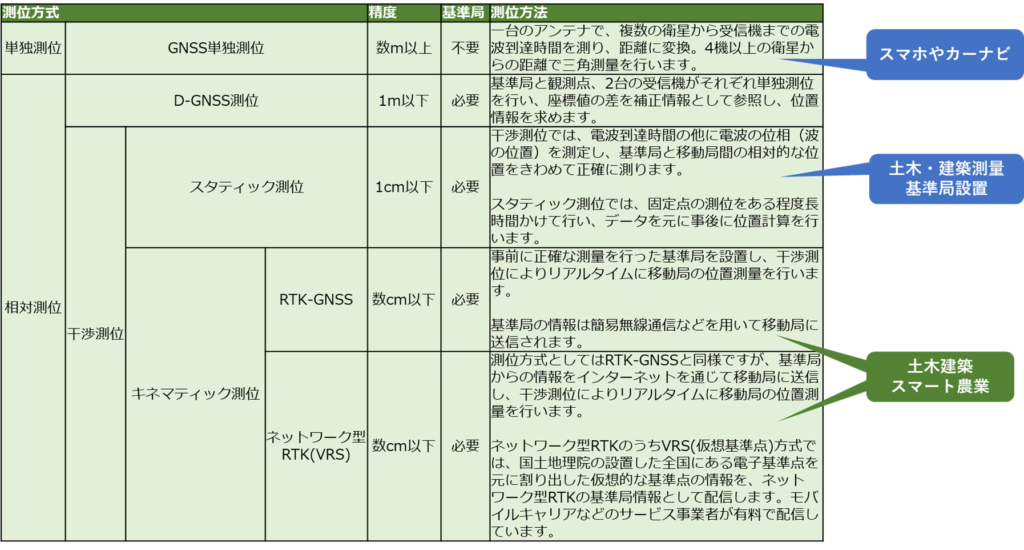
一台のアンテナ・受信機を用いて4機以上の衛星からの電波を受信します。電波には衛星の位置情報と送信時間情報が乗っています。送信時間と受信時間、電波の速度(光速)により、衛星からの距離が計算できます。測定した複数の衛星の距離・位置情報から、三角測量の原理でアンテナの位置を計算します。
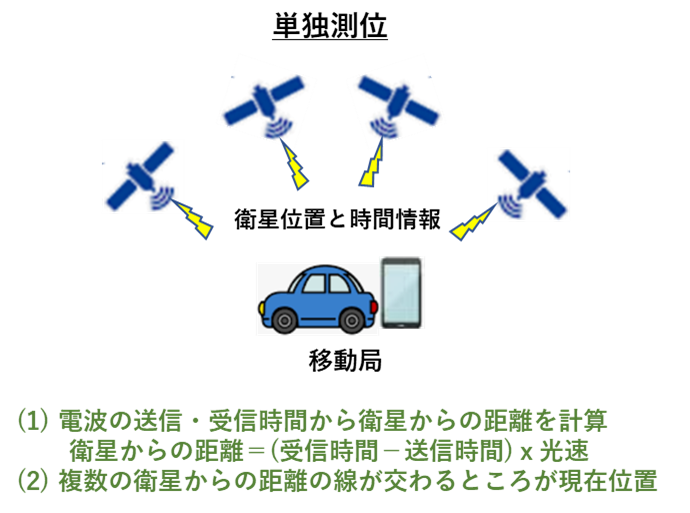
スマホやカーナビで使われている方法です。他の方式と異なり基準局が不要である反面、測位精度はやや悪く(数10cm~数m)、ドローンの自動航行などでは使用されません。
D-GNSS測位
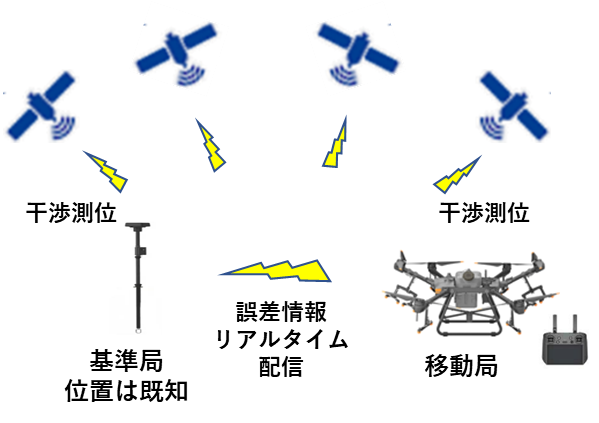
単独測位以外の方式は相対測位と呼ばれ、2台以上のアンテナ・受信機が必要で、一方を基準局として他方の測位を行います。基準局はその位置があらかじめ正確に測量され確定しています。相対測位では、基準局が測位した位置と正確な位置の間の誤差を計算し、移動局に提供することで移動局の測位結果を補正し正しい位置に近づけます。
D-GNSSは相対測位の一つで、Differential GNSSの略です。2台の受信機でそれぞれ単独測位を行います。一方の受信機は固定の基準局としあらかじめ位置情報を確定してあります。単独測位した結果と既知の位置情報の差を誤差としてもう一方の移動局に送信します。移動局は自分自身の測位結果と誤差情報を用いて補正計算し、正確な位置を推測します。
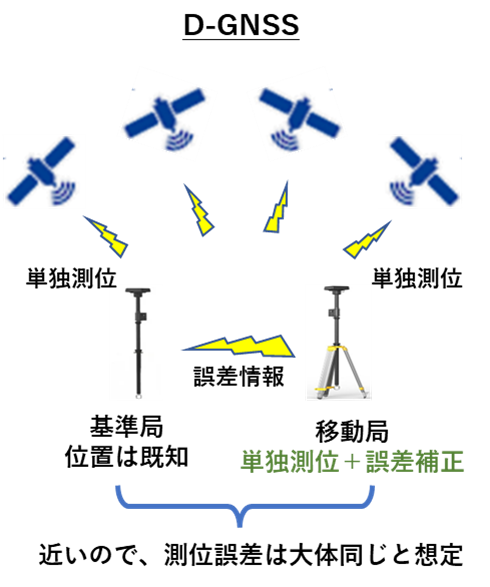
衛星からの距離に基づく位置計算を行うため誤差は比較的大きく残りますが、移動局だけでの単独測位よりは精度がよく1m以下程度の誤差になります。但しスマート農業機器で用いるにはやや誤差が大きく、現在は主流ではありません。
スタティック測位
スタティック測位は基準局を使う相対測位の一つです。単独測位やD-GNSSと異なり、位置の計算に衛星からの信号(時間情報)ではなく、衛星からの電波の波の位置(位相)を測量することで、より正確な測位を行います。これを干渉測位と言います。単独測位では通常1つの周波数の電波を受けますが、干渉測位では2つ以上の周波数の電波で測位を行いより高精度に測定します。
基準局と移動局とでは衛星からの距離が異なるため、それぞれ到達した電波の位相(波である電波の山や谷の位置)も異なります。この差を利用し、より正確に移動局のアンテナの位置情報を補正します。
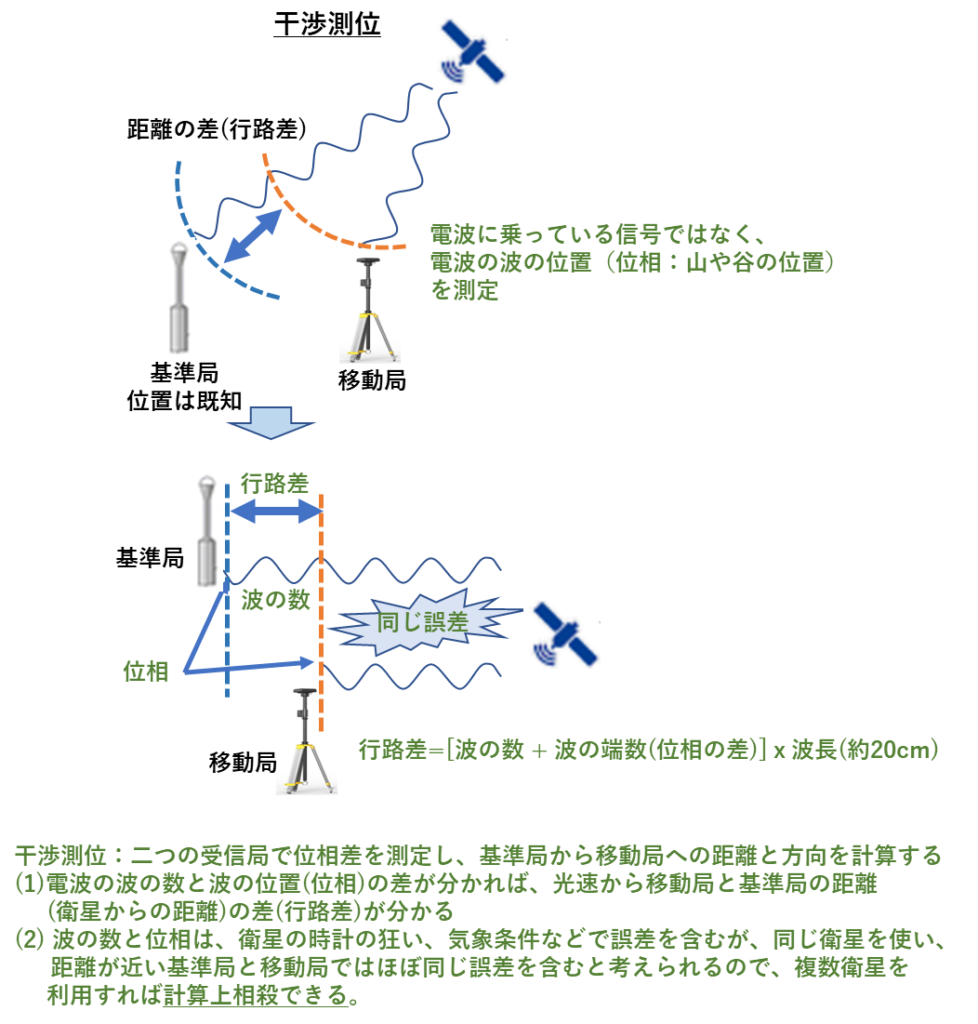
衛星電波の波1個分は20cm程度で、それを100分の一程度まで細かく測定するので、最終的に精度は1cm未満にできます。
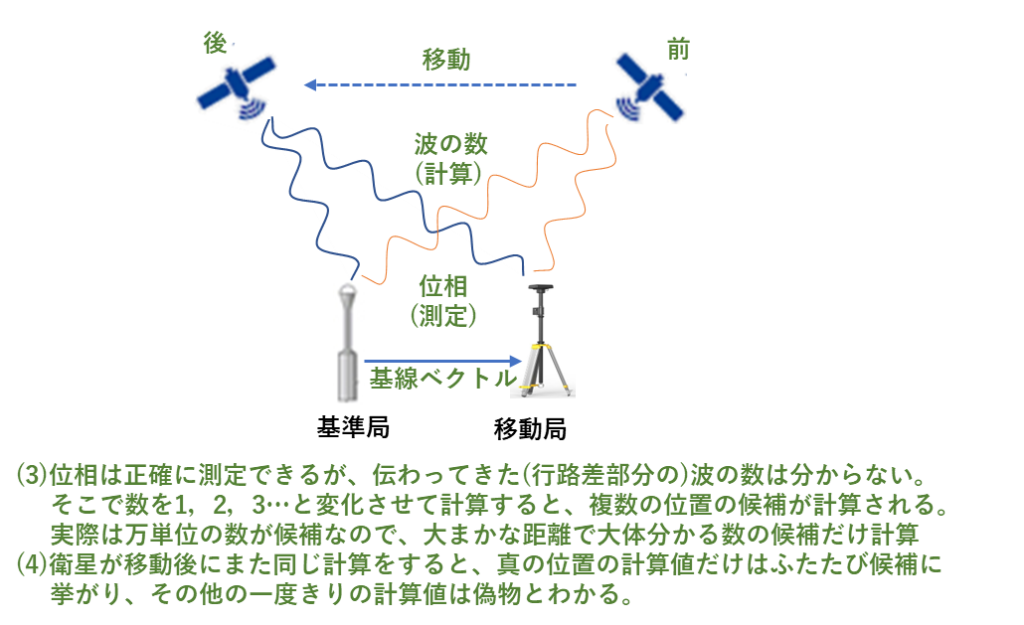
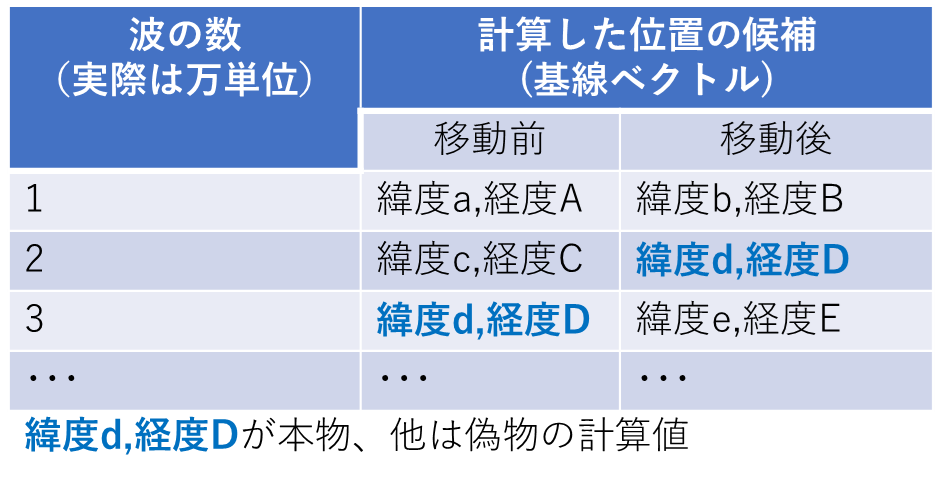
計算の過程で、基準局から測位するアンテナへの距離と方向(基線ベクトル)を算出し、位置を決定します。これを基線ベクトル解析などと言います。スタティック測位ではこの干渉測位の原理を利用します。
位置が完全・正確に分かっている近傍の基準局のデータを利用することで、衛星の時計誤差や伝搬空間の影響が基準局と自局間で相殺され、後はまだ不明である自局(移動局)の位置と「波の数」を計算するのが干渉測位です。大きな測定誤差が相殺により取り除かれたとしても、センチ以下の最終結果を得るまでには少し時間をかけて自位置や波数の候補を絞っていく必要があります。
測位する移動局のアンテナで20分~120分(時間が長いほど正確になる)程度の測量を行い、そののちに近傍の高精度の基準局(国土地理院の電子基準点など)の同時間のデータと合わせて正確な位置を計算し決定します。リアルタイムの測量ではないため、常に移動するドローンなどの測位ではなく、新たな電子基準点や基準局を設置する場合や、高精度の位置情報を必要とする土木測量などに用いられます。
🔳 RTK測位
散布ドローンの自動航行に一般的に用いられる方法です。RTKはリアルタイムキネマティックの略で、移動する(キネマティック)対象についてリアルタイムで測位を行う方式を指します。
RTKは干渉測位の一つで、衛星電波の波の位置(位相と言います)から測位した情報を基準局と移動局間で共有します。常に移動しているアンテナ・受信機に対して基準局からリアルタイムに測量情報を送信し、正確な現在位置を把握する測位方法です。ドローンやスマート農機の自動航行で一般的に用いられています。長時間測位するスタティック測位よりは精度が劣りますが、数センチ単位の十分な精度を持っています。
リアルタイムの測位といっても、衛星電波と基準局のデータから、事前に自位置と前出の「波の数」を決定する必要があります。その準備が終わって初めてリアルタイムの測位を使った航行ができます。数十センチ程度までの精度の誤差を得る計算で比較的早く結果を出す方法又はその結果をFLOAT解、最終的に1−2センチ程度以下の高精度の結果を得る方法・結果をFIX解と言います。
センチ単位の精度を要するドローンを含むスマート農機では、このFIX解が得られるまで早ければすぐに、遅ければ数十分待たされることがあります。受信できる衛星の個数など条件が悪ければ許容時間内にFIXせずRTK航行を断念せざるを得ないこともあります。一度FIXすれば、その最終の結果を使ってその後のリアルタイム航行ができるようになります。山間の圃場など条件の悪いところでは、携帯電波の有無と合わせてRTK(又はネットワークRTK)の比較的大きな課題・問題と言えます。
RTK測位
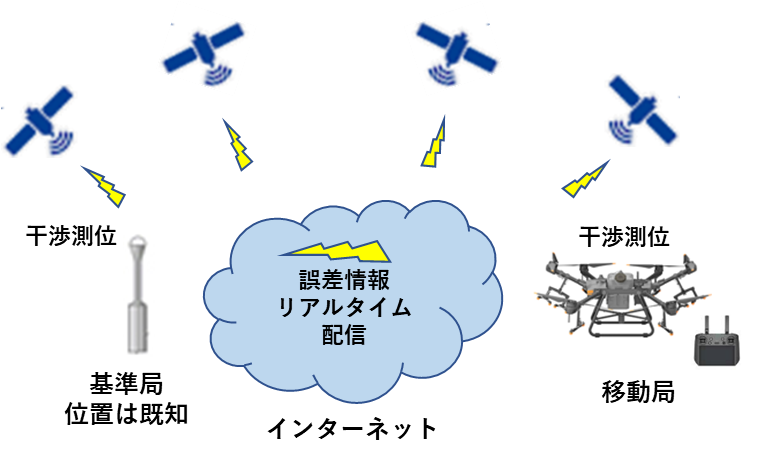
基準局からドローンへ誤差情報を渡す方法もいくつか種類があります。ドローンで一般的な方法はネットワーク型RTKと呼ばれる方法で、誤差情報を提供している基準局からインターネットやモバイル回線を介してデータを受信する方法です。基準局データは有料の場合と無料の場合、また自分自身で基準局を立てて利用することもできます。圃場の近く(通常は10㎞~最大20km程度の距離までとされています)に無料の基準局がある場合は問題ありませんが、距離が離れるほど誤差情報自体の誤差が大きくなってきます。これは、衛星からの電波の通り道の差が、基準局とドローンの間で大きくなってくるためです。近くに無い場合は、圃場の地域をカバーしているサービスを有料で購入することになります。有料サービスの場合は、ほぼ全国をカバーできます。
ネットワーク型RTK測位
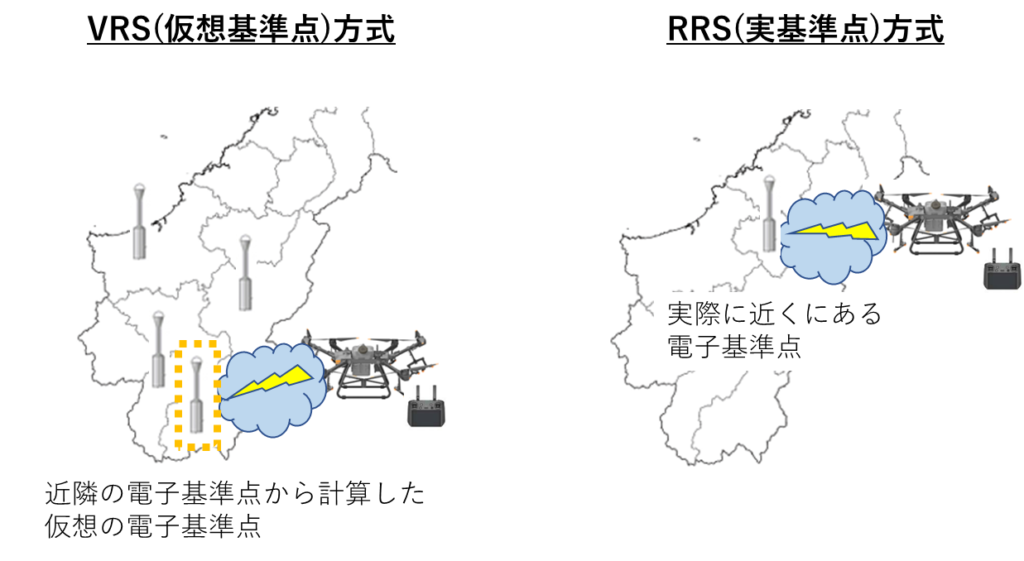
ネットワーク型RTKで使用される基準局(基準点)には、国土地理院の一等電子基準点などからの高品位の情報を元にある地点の仮想的に計算して配信するVRS(Virtual Reference Station:仮想基準点)方式と、実際に近傍に存在する基準局の情報を配信するRRS(Real Reference Station:実基準点)方式の2つがあります。
電子基準点(実基準点、仮想基準点)の情報を配信するこれらの方式の他に、電子基準点の情報を元に計算した移動局位置付近の”面補正データ”という異なるデータを配信するFKP方式という方法もあります。
最近では、農家様や農業法人、行政機関などがRTK基準局を設置し、近隣の圃場を対象に情報を配信している例も増えています。
VRS、RRS、公開・自前基準局のいずれも、RTKのデータ配信方式であるNTRIPや、RTCM(海事サービスのための無線技術委員会、非営利の国際規格組織)が定めたデータ規格に従っており、同じ機器で使用できます。
弊社ではネットワーク型RTKとしてソフトバンク社のichimill(イチミル)、及びNTT Docomo社のdocomo IoT高精度GNSS位置情報サービスを利用、また弊社本社(島根県益田市)近隣では自社基準局も状況に合わせて利用し、散布・測量・空撮ドローンの飛行に使用しています。
🔳 基準局設置支援
独自に基準局を設置し、近隣圃場のドローンや自動田植機などスマート農機の導入を検討される場合は、弊社で設置の支援をいたします。固定インターネット回線が無く携帯電波も入らない山間の圃場でも、スターリンク(衛星インターネットアクセスサービス)を使用した基準局構築や機器運航が可能です。
🔳 高津屋技研本社基準局
本社敷地内(島根県益田市高津)に自社基準局を設置し公開しています。近隣の20km以内程度の範囲であれば、対応するRTKクライアント(ドローンやRTK受信機)で自由にまた無料でご利用いただけます。
- 緯度:34度41分15.6254秒
経度:131度48分37.0198秒
楕円体高:42.420m ※地球をきれない楕円体に見立てた時の楕円表面からの高さ
測位:国土地理院の電子基準点(益田、三隅、須佐)とのスタティック測位(基線ベクトル解析) - NTRIP Caster
アドレス、ポート:ntrip1.bizstation.jp:2101
マウントポイント:709001EE
ユーザ名(メールアドレスなど任意の文字列)
パスワード(任意の文字列)
(下記Caster経由の配信は2024/5/1から休止中です)
- NTRIP Caster
アドレス、ポート:rtk2go.com:2101
マウントポイント:Takatsuya
ユーザ名(メールアドレスなど任意の文字列)
パスワード(任意の文字列)
お問い合わせはこちらまでお願いします。